
In systems and control, classical model-based approaches for controlling individual systems have a history of success in standard stabilization or regulation tasks. However, when it comes to coping with highly complex systems and complex tasks that permeate not only our Visionary Examples but also other aspects of modern society (e.g., industry 4.0, smart grids, or autonomous driving), the field faces significant challenges. These tasks are being transformed into more abstractly defined decision and control problems of the “fabricate product X at quality level y” kind.
This calls for designing potentially intricate interconnections of multiple heterogeneous systems by taking advantage of the exploding advances in communications (internet of things, 5G, etc.) and ubiquitously available computing power. Integrating the abundant data generated to make such networked dynamical systems operational in an optimal fashion presents a special challenge but also a great opportunity.
New developments in the field of machine learning (such as neural network methods) if fused effectively with traditional model-based paradigms hold out great promise for managing complex coupled systems. The overarching goal of this Project Network is to develop novel methodologies that aim at exploiting the benefit of data and learning structures on top of classical first-principles models and that are still capable of providing rigorous guarantees of overall system behavior.
Our work program tracks the steps of the systems and control design cycle, from developing proper model representation frameworks to the corresponding techniques for analyzing and synthesizing controllers.
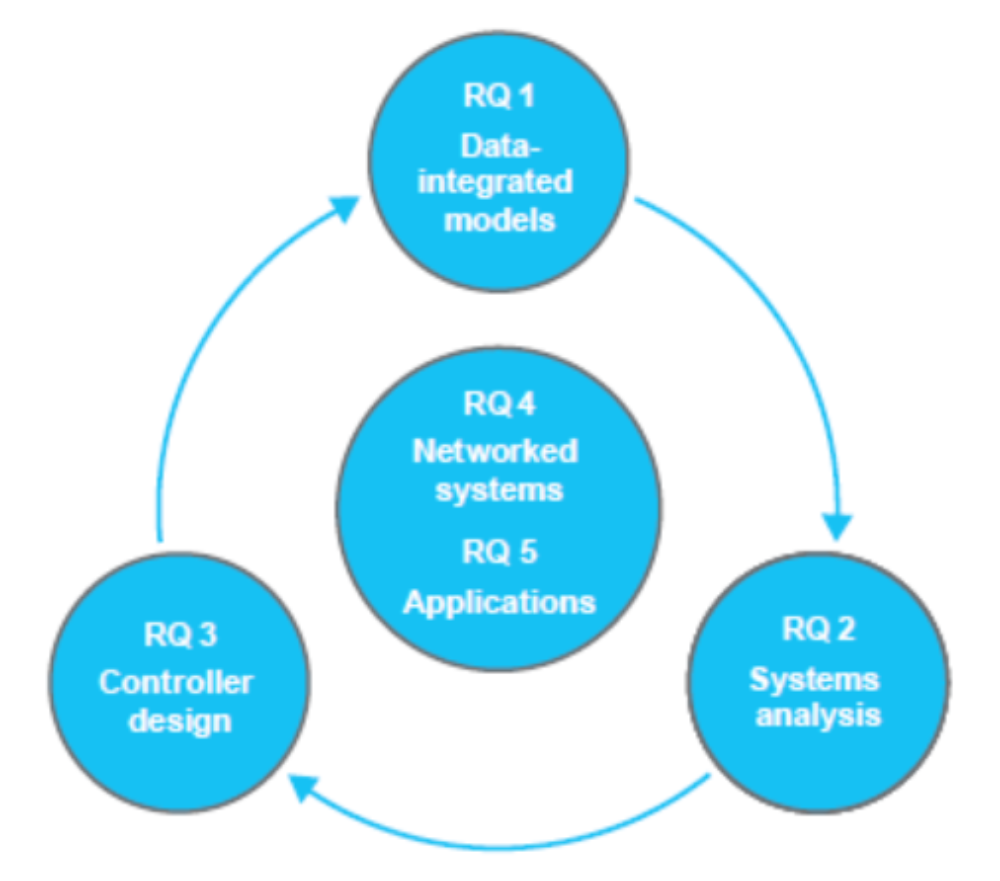
Research questions
RQ 1 From first principles to data-integrated models: How can we combine first-principles models with input-output relations learned from data?
RQ 2 Computational analysis of system theoretic properties: How can we guarantee system theoretic properties for mixed feedback systems described by evolution equations and data relations?
RQ 3 Synthesis of data-integrated controllers: How can we fuse model-based and data-based controller synthesis techniques?
RQ 4 From single loops to controlling networks: How can we design networks of systems for adaptive decisions at the higher systems level?
RQ 5 Applications in robotics and biology: How can we ensure practical applicability?
Ongoing projects
Completed projects
Project Network Coordinators

Frank Allgöwer
Prof. Dr.-Ing.Mechanical Engineering
[Photo: SimTech/Max Kovalenko]

Peter Eberhard
Prof. Dr.-Ing. Prof. E.h.Engineering and Computational Mechanics
[Photo: SimTech/Max Kovalenko]