Project description
This project contributes to the understanding and control of heterogeneous multi-agent systems in dynamically changing environments. It strives to bring sophisticated distributed control schemes into control practice. In this project, state-of-the-art learning-based and adaptive control methods are studied with a special focus on theoretical guarantees to ensure a safe and reliable operation during those learning phases. Of particular interest is how assumptions and guarantees from theoretic considerations translate into real-world scenarios through meaningful hardware experiments (see Figure 1), providing other, purely theoretical research projects in the network with valuable insights. The choice of the learning method that in practice best fits the requirements on the available data to efficiently learn unmodeled parts of the agent’s dynamics is of particular interest, with the intended focus being on stochastic Gaussian process regression.

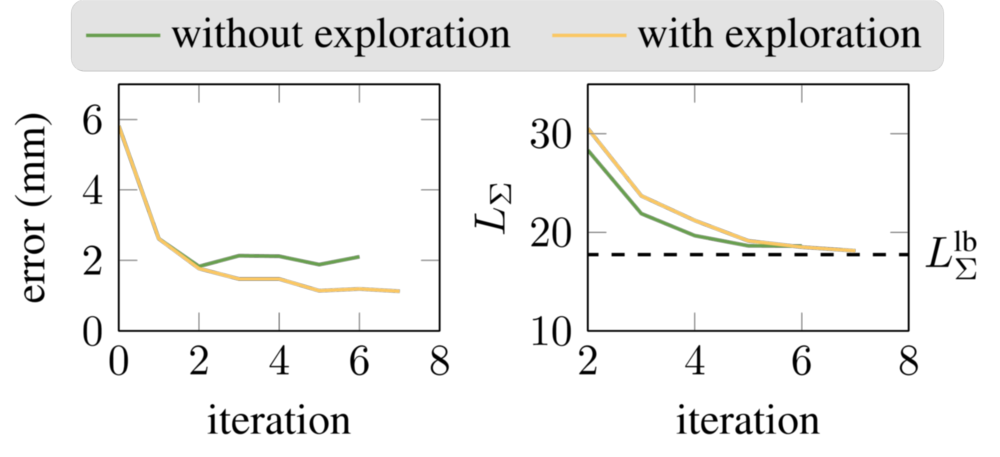
A special focus in the second funding phase are iterative schemes that autonomously explore the agent’s dynamics, enriching the data set for learning and increasing the robustness by decreasing the level of uncertainty of the data-based model. This will in the long run improve the model accuracy and, therefore, increase the control performance (see Figure 2). The learning phase needs to be done in a safe and controlled manner, e.g., by using suitable robust control strategies, in order to guarantee the stability of the overall system when venturing into unknown parts of the state space.
Project information
| Project number | PN 4-4 (II) |
| Project title | Learning from data - predictive control in adaptive multi-agent scenarios |
| Project duration | September 2022 - December 2025 |
| Project leader | Peter Eberhard (Frank Allgöwer) |
| Project staff | Hannes Eschmann, doctoral researcher |
| Project partners | Carsten Scherer David Remy Kurt Rothermel Jörg Fehr Benjamin Unger Oliver Röhrle Syn Schmitt |
- Preceding project 4-4
Theoretical guarantees for predictive control in adaptive multi-agent scenarios
Publications PN 4-4 and PN 4-4 (II)
2024
- M. Rosenfelder, H. Ebel, and P. Eberhard, “Force-Based Organization and Control Scheme for the Non-Prehensile Cooperative Transportation of Objects,” Robotica, vol. 42, Art. no. 2, 2024, doi: 10.1017/S0263574723001704.
- J. Chen, W. Luo, H. Ebel, and P. Eberhard, “Optimization-Based Trajectory Planning for Transport Collaboration of Heterogeneous Systems,” at - Automatisierungstechnik, vol. 72, Art. no. 2, 2024, doi: 10.1515/auto-2023-0078.
- H. Ebel, M. Rosenfelder, and P. Eberhard, “Cooperative Object Transportation with Differential-Drive Mobile Robots: Control and Experimentation,” Robotics and Autonomous Systems, vol. 173, p. 104612, 2024, doi: 10.1016/j.robot.2023.104612.
2023
- M. Rosenfelder, H. Ebel, and P. Eberhard, “A Force-Based Formation Synthesis Approach for the Cooperative Transportation of Objects,” in Advances in Service and Industrial Robotics, T. Petrič, A. Ude, and L. Žlajpah, Eds., in Mechanisms and Machine Science, vol. 135. Springer, 2023, pp. 317–324. doi: 10.1007/978-3-031-32606-6_37.
2022
- H. Eschmann, H. Ebel, and P. Eberhard, “Exploration-Exploitation-Based Trajectory Tracking of Mobile Robots Using Gaussian Processes and Model Predictive Control,” Robotica, vol. 41, Art. no. 10, 2022, doi: 10.1017/S0263574723000863.