What is the NML?
The Neuromechanics Laboratory (NML) at the University of Stuttgart is a shared space for all those who wish to investigate the relationship between human movement, its neural causes and its mechanical consequences. The experiments in the NML range from basic neurophysiology to motion analysis and human-machine interface. According to specific problems large amounts of data are generated that serve the development and validation of neuromusculoskeletal models. The results are used to understand human neurophysiology, to treat disease, to develop new training and rehabilitation concepts, and to further develop exoskeletal systems.
Application fields
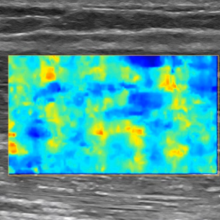
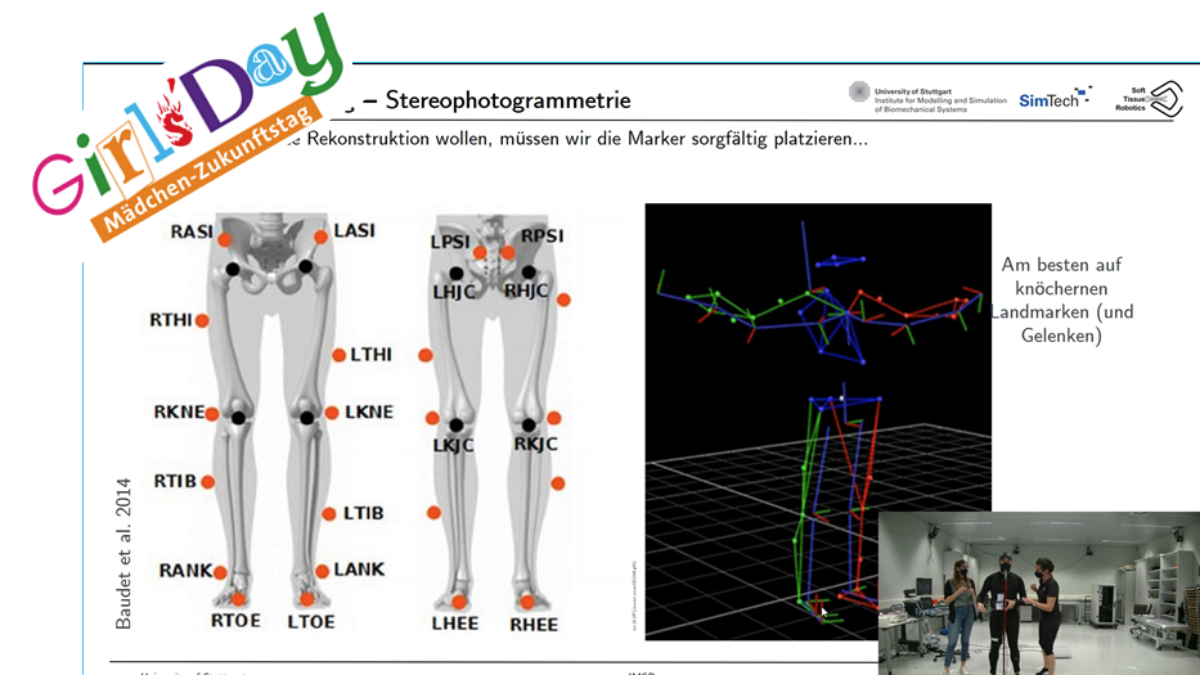
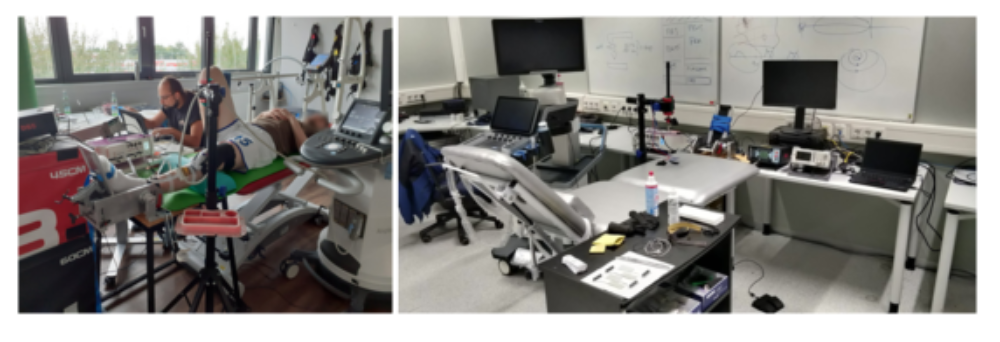
The laboratory has cinematographic analysis using marker-based motion analysis, dynamic systems for measuring forces and torques, and high-resolution electromyography and shear wave elastography using ultrasound. Other systems are available for a variety of applications including mechanical and electrical stimulation, a pedometer and blood pressure measurement systems.
In addition to the commercially available products, in-house developments are constantly being implemented, tested and validated in the laboratory for specific studies. One of these products is currently being patented, an automated scanner system for ultrasound probes. Various software tools and data analysis scripts are available for the hardware. In addition to scientific use, there is also the possibility of industrial cooperation by making the laboratory available, including scientific expertise, for product testing and validation.
The NML was founded in 2019 as part of the SimTech Cluster of Excellence and the Chair of Continuum Biomechanics and Mechanobiology (CBM) of the Institute for Modelling and Simulation of Biomechanical Systems (IMSB). It is currently headed by Franziska Bubeck.
News
Girls' Day
At the Girls' Day of the University of Stuttgart we invite all interested young female students to experience our research first hand. The next Girls' Day will take place on 24 April, 2024.
qMOTION - Simulation-enhanced High-density Magneto-myographic Quantum Sensor Systems for Decoding Neuromuscular Control During Motion
Prof. Röhrle wins prestigeous ERC-AdG
He receives from the ERC 3.5M Euros over the next 5 years for his project "qMOTION"
Ongoing Projects

Muscle spasticity, prevalent in various pathologies, often leads to resistance in muscle stretching, causing structural and mechanical changes in musculature and subsequent functional limitations at the affected joint. Botulinum toxin type-A (Botox) injections are widely used for spasticity management. This project focuses on assessing the effects of Botox on biceps brachii muscle mechanics and elbow joint function in patients. Using shear wave elastography, a comprehensive assessment of post-Botox changes in biceps brachii muscle mechanics compared to its pre-injection state is sought to provide key insights into Botox's effectiveness for spasticity management, contributing to refined approaches for neurological disorders.
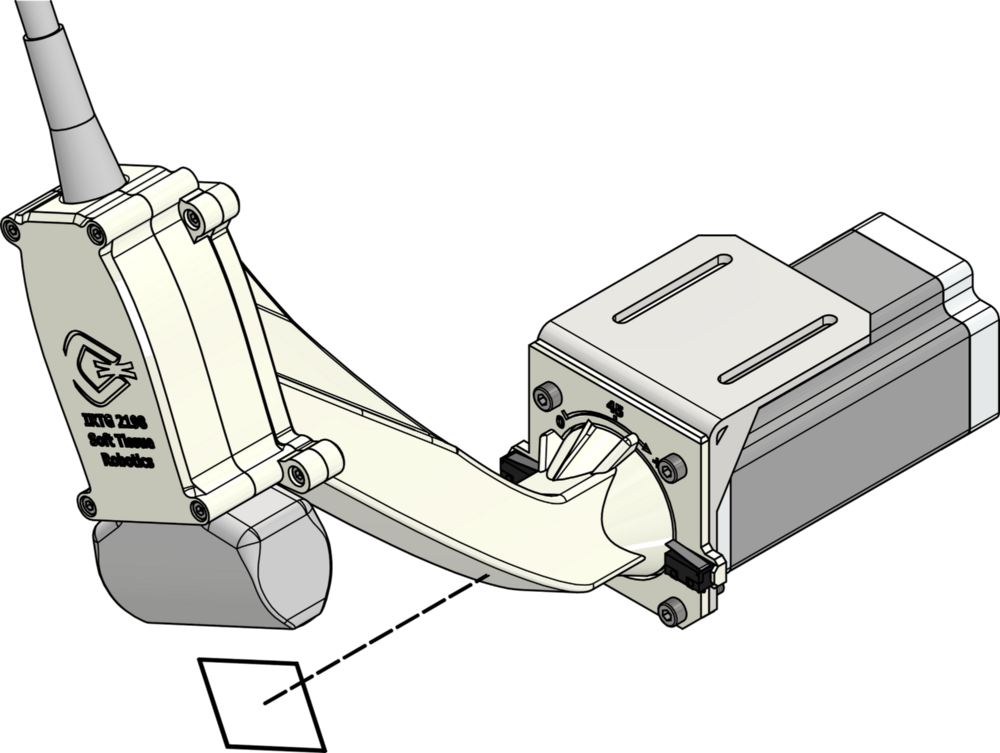
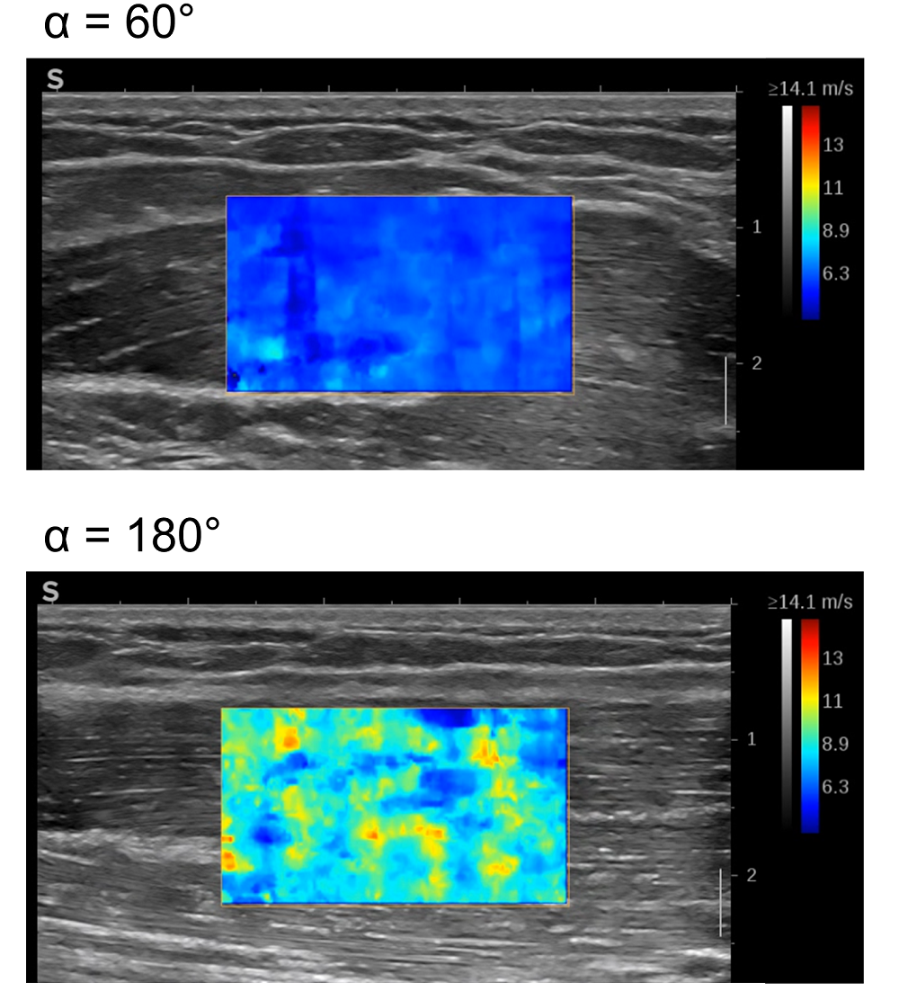
Skeletal muscle mechanics can be assessed in vivo using shear wave elastography. However, the impact of pennation angle on the measured shear wave velocity remains unclear. This project aimed to quantify the effect by automatically aligning the ultrasound probe with muscle fiber orientation. An interdisciplinary team of PhD students from the DFG International Research and Training Group “Soft Tissue Robotics” developed this robotic ultrasound probe system and evaluated its use in a study on gastrocnemius medialis muscle stiffness.
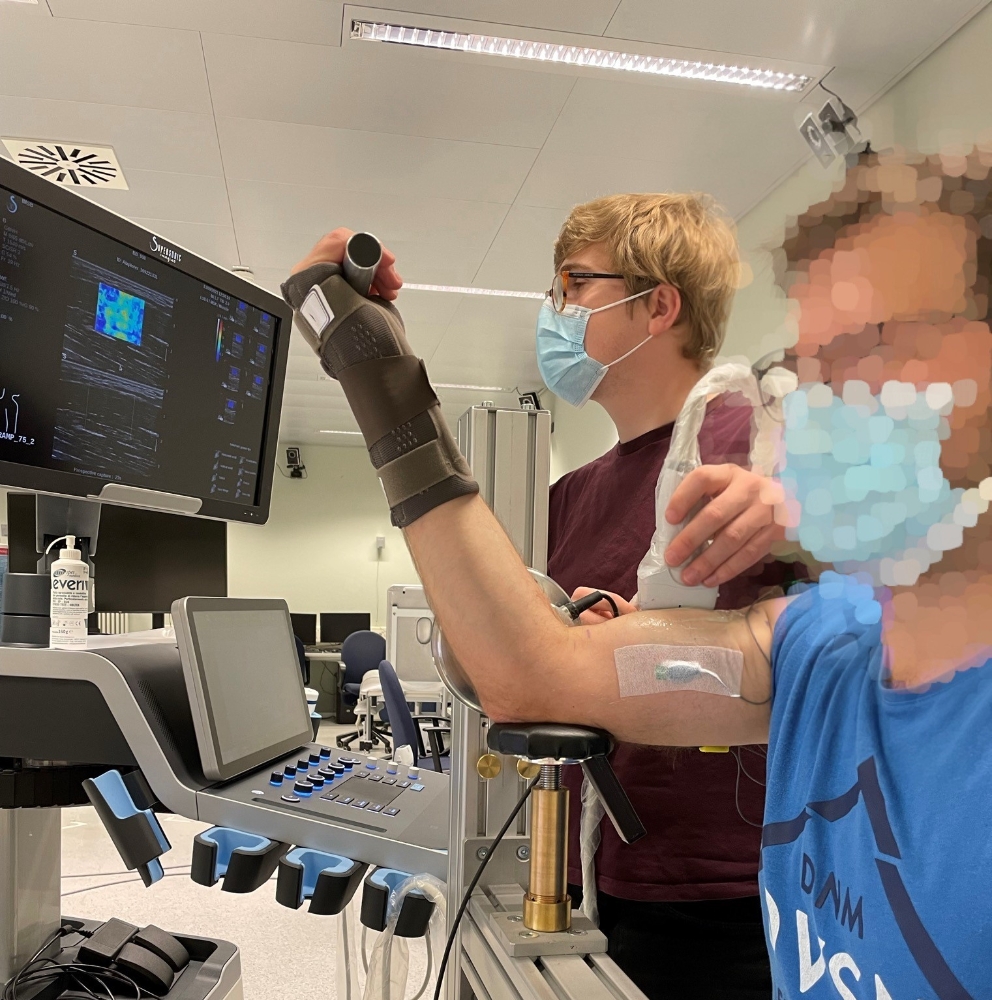
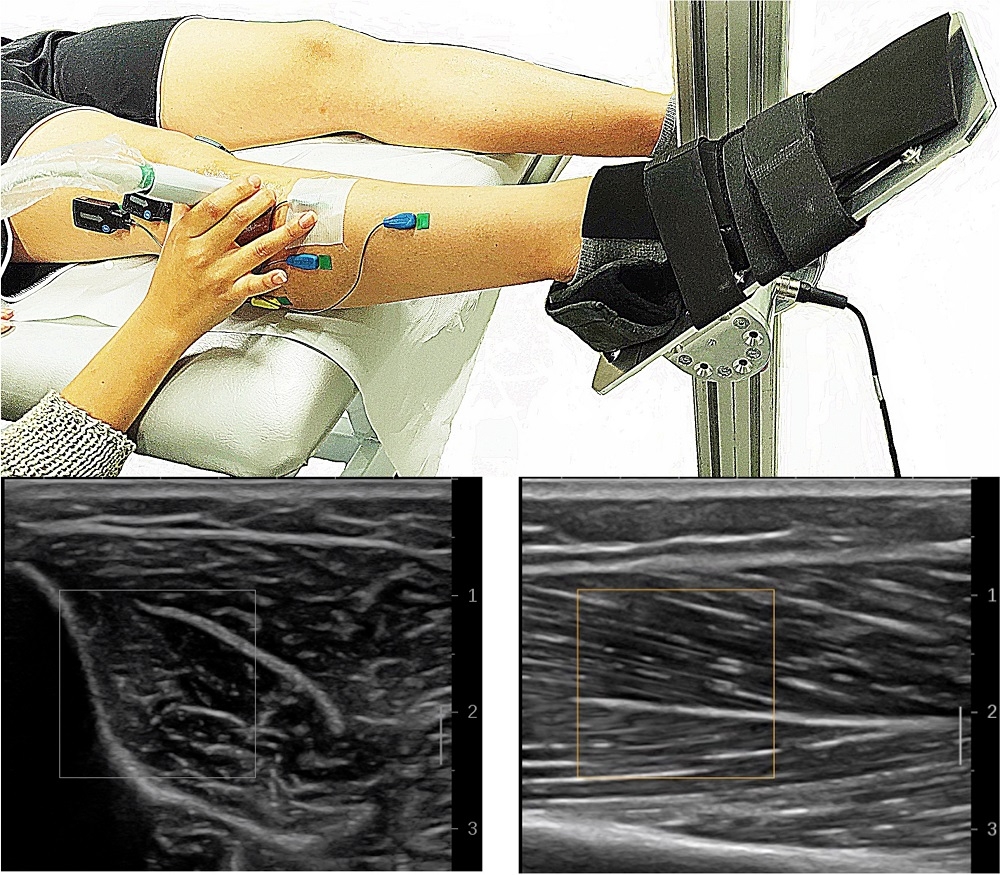
Mechanics of individual muscles in their in vivo environment are not well studied. Shear wave elastography (SWE) as a non-invasive technique was shown to be promising in quantifying the local mechanical properties of skeletal muscles. This project aimed to investigate the mechanics of the biceps brachii muscle derived from SWE in relation to elbow joint position and contraction intensity during isometric contraction.
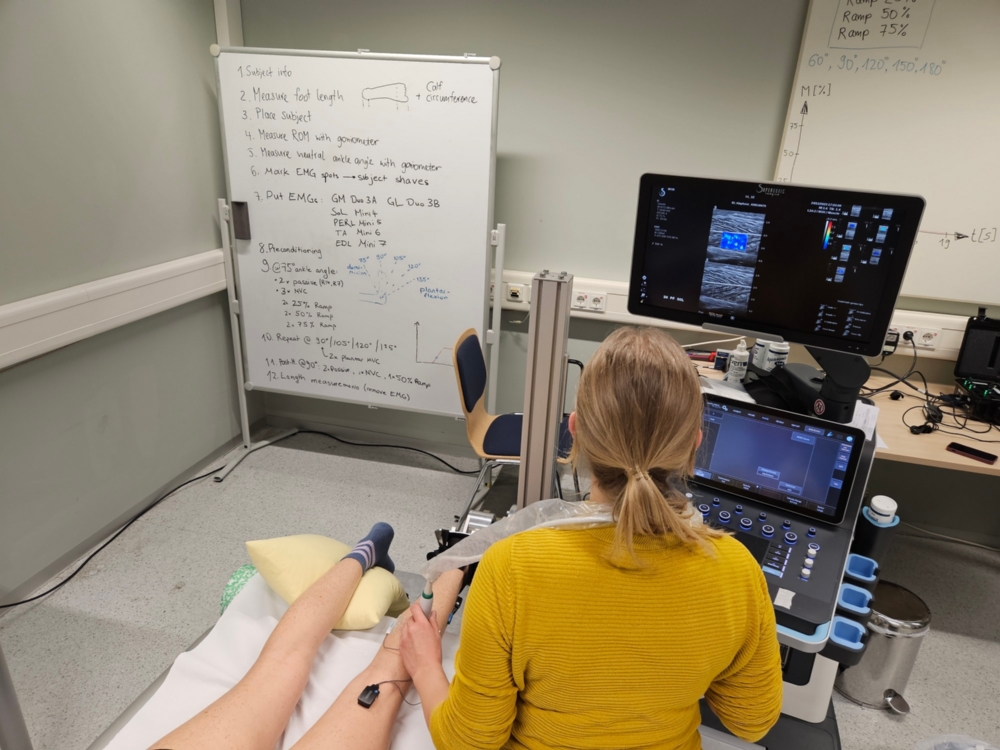
To design effective exercise or rehabilitation routines, it is crucial to quantify the mechanics of individual muscles. Using shear wave elastography (SWE), we investigated different dorsiflexor and plantar flexor muscles in relation to ankle joint position and function. Specifically, we tested whether SWE reflects the changes in muscle due to (i) length changes imposed by the ankle position in a passive state, and (ii) the activity level changes during isometric contractions. From these insights we aim to develop a lower leg muscle force estimation model using computational approaches and clinical tendon force measurements for validation.

Aging leads to a decline in muscle mass and force-generating capacity. Using shear wave elastography (SWE), this project captured the age-related muscular adaptation of the biceps brachii muscle. In an experimental study, 14 healthy volunteers aged 60–80 participated and their muscle mechanics were assessed, hypothesizing that the shear elastic modulus reflects (i) passive muscle force increase imposed by length change, (ii) activation-dependent mechanical changes, and (iii) differences between older and younger individuals.
Neuromuscular diseases are often accompanied by muscle weakness; however, little is known about mechanical adaptations of the affected muscles. As the latter can be assessed using ultrasound shear wave elastography, this project characterized the biceps brachii muscle of patients with Myasthenia gravis (MG) and Facioscapulohumeral Muscular Dystrophy (FSHD) and compared them with previously collected data of healthy volunteers.
Proprioception (or afferent feedback), is known to play a central role in the regulation of muscle activity. Capturing proprioceptive information is hardly achievable in humans.
Due to the difficulty in recording sensory signals, and the relative ease to harvest their motor counterparts, traditional modeling approaches often neglect the afferent information, focusing only on the description of muscular activity, and assuming the motor output as the net result of sensorimotor integration.
A more complete information about the effects of sensory alteration on motor output will improve the accuracy and reliability of our models.
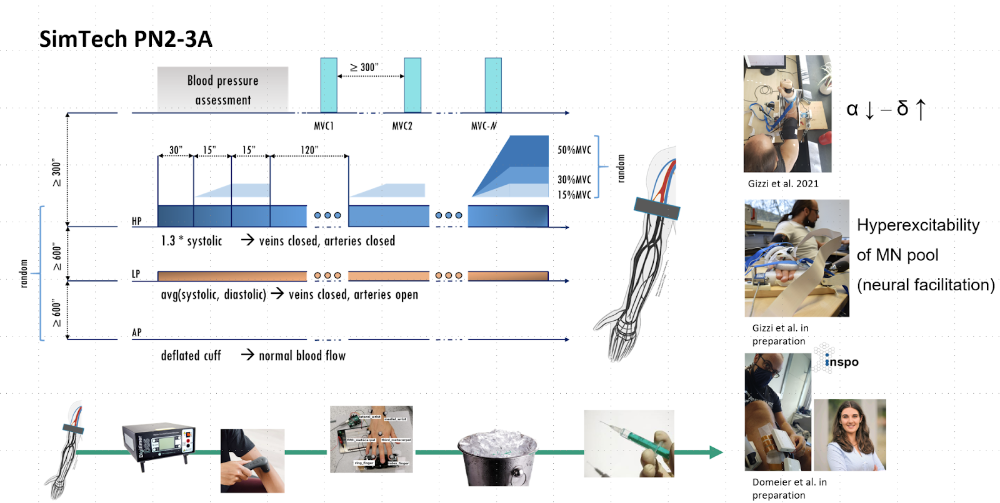
The goal of this project is to enhance the understanding of the somatosensory system in humans and its objective is determining the contribution of sensory information on motor command. By delivering controlled stimuli to specific somatosensory receptors and evaluating the changes in motor drive, PN2-3A aims at creating a dataset of high quality baseline and perturbed neuromechanical data and isolating the individual and compound effects of afferent information on motor output.
Current status:
The first perturbation paradigm (Blood Flow Restriction - BFR), is implemented and has been successfully tested on tens of healthy volunteers, the first study of the influence of BFR is published and two are on the way!
The next perturbations (mechanical - vibration and electrical stimulation) have been approved by the Ethical Committee of the University of Stuttgart and are being tested as we write.
Myotonia and Charcot-Marie-Tooth type 1A (CMT1A) are distinct neuromuscular conditions. involving delayed muscle relaxation after contraction and muscle weakness, respectively. Despite unique features, their impact on muscle mechanics remains poorly understood. Using shear wave elastography, this project aims to characterize tibialis anterior muscle mechanics in individuals with myotonia and CMT1A compared to controls. Examining changes at the muscular level, (i) in a passive state for different muscle lengths, and (ii) during an activated state at different contraction intensities, we aim to identify mechanical signatures associated with each condition, advancing our understanding and potential therapeutic interventions.
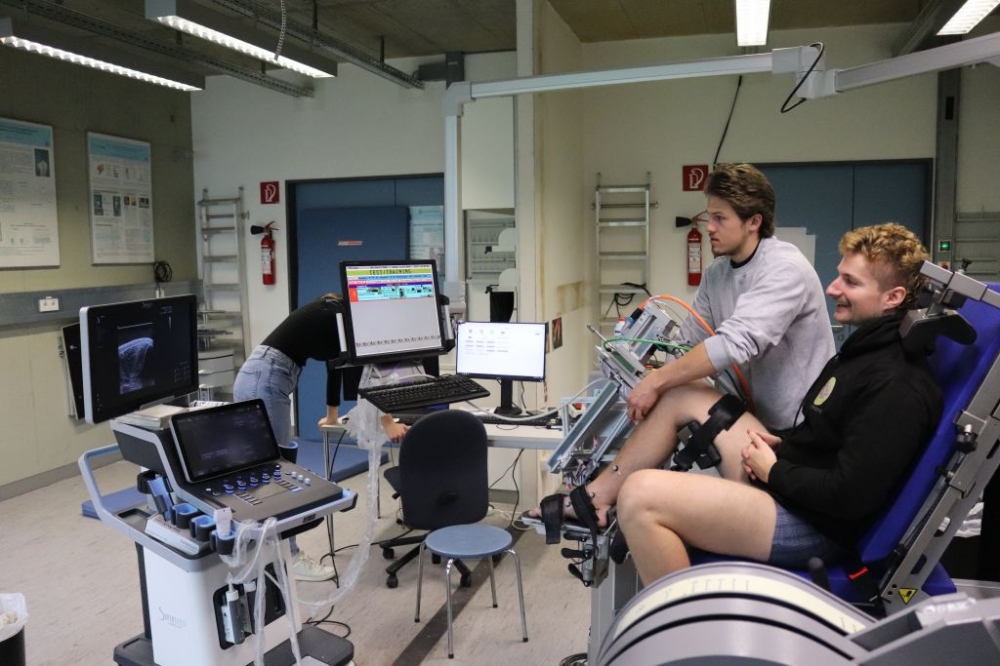
The aim of this project is to provide and use comprehensive data for the development of a realistic 3D human muscle model. This model can than be used to predict changes in 3D muscle architecture, shape and force during contraction and will be adapted to different subject groups in order to take into account the influence of e.g. gender, age or sport. For our research we use an isokinetic dynamometer in combination with the Aixplorer MACH20 ultrasound system of the Neuromechanics Lab.
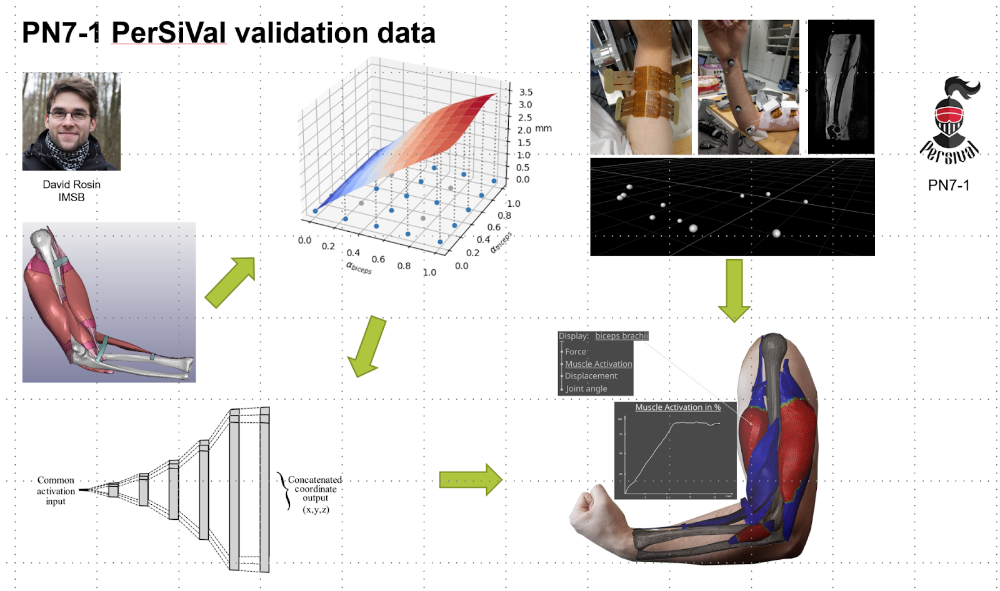
Pervasive Simulation And Visualization Under Resource- And Time-Constraints, nickname PerSiVal, revolves around the idea of combining continuum-biomechanics with novel human-machine-interaction concepts, and distributed systems knowledge, to bring a type of simulation that is slow by nature, into a real-time application. Preliminary results of the project show this to be possible. By using different types of neural network (NN) surrogates, real-time evaluation of the surface deformation of the biceps has already been achieved on both a non-high-end PC as well as the augmented reality headset HoloLens 2. Further development of this project could give rise to opportunities to integrate muscle recruitment strategies based on motor-unit-pools into the model, which in turn would allow these simulations to be directly informed by data recorded in the NML.
- PerSiVal was awarded the prize for best poster at the SimTech Status Seminar 2021:https://www.imsb.uni-stuttgart.de/institute/news/news/SimTech-Status-Seminar-2021-Best-Poster-Award/
Being able to decode neural signals that control skeletal muscles with high accuracy will enable scientific breakthroughs in diagnostics and treatment, including early detection of neurodegenerative diseases, optimizing personalized treatment or gene therapy, and assistive technologies like neuroprostheses. The current gold standard to decode motions is the decomposition of high-density electromyographic (EMG) signals; a well-established tool in our NML. However, a set of physical limitations limits the accuracy of EMG-based decompositions. Measuring tiny magnetic fields induced by the activity of skeletal muscles has great potential to overcome some of EMG’s inherent limitations. Thus, high-density magnetomyography (MMG) could be a game-changing methodology, which is pioneered in qMotion.
In this project, we utilize recent technological developements to precicsly measure electrical muscle activity, both invasive and non-invasive, enabling a deeper understanding of neuromuscular disorders and their respective pathologically altered electrical activity. The multidisciplinary approach involves collaboration between neurologists, engineers, and data scientists, fostering a comprehensive understanding of the neuromuscular system and to enrich existing in-silico models.
Past Projects
Muscle tension or pain is clearly noticeable, but we know little about its associated objective changes in the muscle. Ultrasound shear-wave elastography measures muscle elasticity or stiffness and shows a surprisingly inhomogeneous distribution of stiffness in active muscles.
Funded by Hochschulen für Angewandte Wissenschaften (HAW), and in cooperation with the Hochschule Fruthwagen (HFU), this project focuses on the relationship between the mechanical properties of active motor units and their state of activation, also in relation to aging and arthritic muscle pain.
More information can be found at the page of the Hochschule Furthwagen: https://www.hs-furtwangen.de/aktuelles/detail/2262-innovativ-muskelverspannungen-messen/
In cooperation with AAlto University (prof. Ivan Vujaklija).
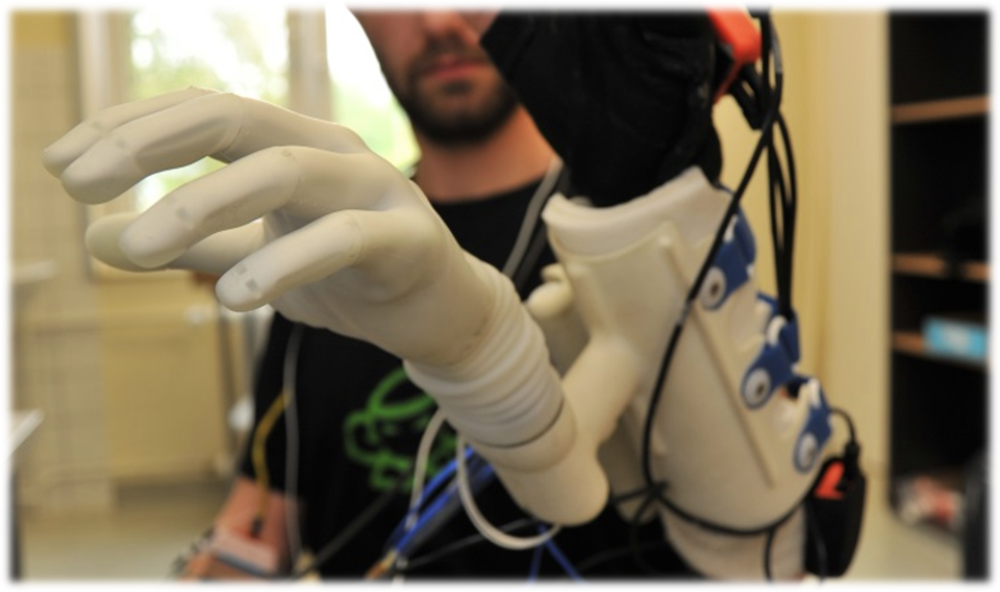
The main theme of research is the influence of somatosensory integration on motor control. Albeit motor commands can be easily detected and robustly interpreted, sensory feedback (representing over 90% of the information traveling through the nervous system), is still elusive. A better understanding of how the central nervous system perceives the sensory information and how the latter influences motor responses, can have extraordinary consequences on our understanding of the human body, and in the design of unprecedented dexterous human machine interfaces, like orthoses or prostheses.
The project was kicked-off in February 2022.
Fundamental challenge of an aging society is maintaining its members active and independent. Strategic milestones for succeeding in this task, are sustainable programs of physical activity, and an effective policy of short and long-term rehabilitation. If properly used, those translate into longer, healthier, and happier lives, and reduce health-associated costs for individuals and the society.
A punctual evaluation of the efficacy of those policies is however difficult, with the holistic instruments of rehabilitation, and a more systematic approach is necessary. Mathematical modelling is widely used in domains such as physics, construction and mechanical engineering, economics and social sciences. In the last decades, new models emerged that faithfully describe human neuromechanics (neurophysiology and biomechanics), revealing unprecedented opportunities for understanding the basic functions of the human body and how those can benefit from external interventions.
The aim of the project is to promote a deep and constructive dialog between the domains of neuromechanics (experimental and in silico) and rehabilitation, by means of 2 main actions:
- The organization of a Summer School and a round table on Neuromechanics and Rehabilitation
- The creation of a series of public outreach initiatives to raise awareness on healthy ageing and systematic evaluation of rehabilitation/training outcomes
Ancillary initiatives (e.g., the publication of the proceedings of the Summer School) will be used to maximize the impact of the main actions.
This project was kicked-off in January 2022 in cooperation with the University of Genova (Prof. Marco Testa). It leverages on the 7th goal of the University of Stuttgart „Emphatic commitment to sustainable development“, and the new born initiative „Campus green“ of the University of Genova.
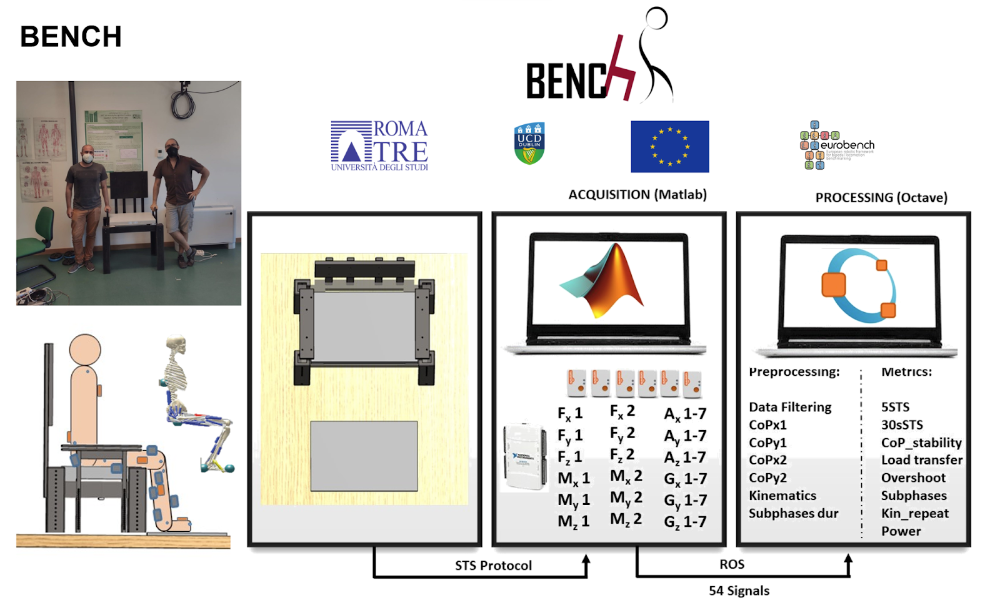
A Biomechanical tEsting platform for of sit to staNd assessment with an instrumented Chair (BENCH)
Sit-to-stand (STS) is an important task for assessing dynamic balance and lower limb coordination and has been shown to have a significant clinical relevance. As a result, STS is important also for assessing the performance of wearable lower-limb exoskeletons for assistance and humanoid robots that imitate human movements. BENCH aims at developing one integrated system for the assessment and benchmarking of the sit-to-stand gesture in intact and impaired individuals, in human/exoskeleton systems and in humanoid robots. The proposal aims at developing an instrumented testbed, as well as a set of software routines for the extraction of meaningful neuro-mechanical indicators, together with an initial database of human subjects in different scenarios.
Contact

Franziska Bubeck
Research Assistant